Chobotnice inspirují konstrukci lékařských nástrojů
25. 5. 2015 – 15:00 | Technologie | Jan Toman |Diskuze:

Představte si, že se za pár let vydáte jako obvykle do práce. Stačí přejít silnici. Přesně uprostřed se ale ozve skřípot brzd. Následuje náraz a tma. Když znovu otevřete oči, oslní Vás ostré světlo operačního sálu.
„Nebojte, pane paciente. Měl jste nehodu, ale bude Vás operovat tady Eda,“ pronese konejšivým hlasem doktor. A vzduchem zavíří gumové chapadlo. Začátek nového vědeckofantastického filmu? Ani omylem.
Podobný výjev se možná zanedlouho stane v operačních sálech samozřejmostí. Laparoskopie, při které se do pacienta vpraví potřebné nástroje malými otvory v kůži, je dnes už standardní procedurou.
Příliš nepřekvapí ani operace prováděné s pomocí precizních lékařských robotů ovládaných školenými lékaři. Tyto techniky posunuly chirurgii o obrovský kus kupředu, ale mají svá omezení.
Při laparoskopii se například do pacienta musí vpravit různými otvory několik nástrojů – některé slouží k přidržování orgánů, jiné k řezání, vyjímání nebo optické kontrole. Dnešní lékařské nástroje jsou navíc pevné a nepoddajné.
Všechny tyto problémy by ale mohla vyřešit inspirace přírodou. Chobot nebo třeba chapadlo neslouží k jednomu pevně danému účelu, ale mohou plnit celou řadu úkonů. Toho si také všimli italští odborníci na lékařskou robotiku a sestrojili prototyp článkovaného chirurgického chapadla.
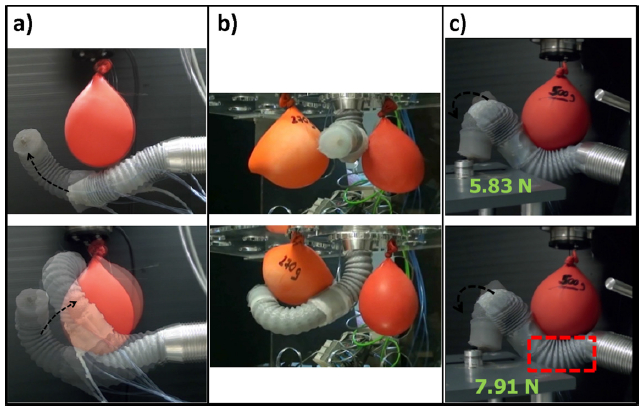 Chapadlo při testech ohmatává vodou naplněné balónkyzdroj:
IOP
Chapadlo při testech ohmatává vodou naplněné balónkyzdroj:
IOP
Základ jednoho článku tvoří plášť z pružného silikonu. Pohyb do všech směrů a prodlužování do délky zajišťují tři podélné vzduchové balóny obklopující střed válce, které se mohou nezávisle na sobě nafukovat a vyfukovat.
Oddělené jádro je potom naplněného kávovými zrny a zajišťuje potřebnou pevnost – vysátím vzduchu se do sebe zrna zaklesnou a drží požadovaný tvar. Celé chapadlo tak elegantně zajišťuje funkci hned několika dnešních nástrojů.
Některé články mohou lékaři například nechat ztuhnout u překážejících orgánů a podržet si je tak stranou, zatímco konec chapadla volně operuje na požadovaném místě.
Zdroj: T Ranzani, G Gerboni, M Cianchetti & A Menciassi (2015): A bioinspired soft manipulator for minimally invasive surgery. Bioinspiration & Biomimetics, 10(3).